Was bedeutet eigentlich Elektrotechnik? Das ist oft die Frage der Lernenden, wenn sie sich für das Technische Gymnasium interessieren. Um diese Frage zu beantworten geben wir hier einen kleinen Einblick in Teile des Unterrichtsinhalts der Klasse 11, der sogenannten Einführungsphase der Oberstufe.
Unterrichtsinhalte sind in dieser Phase zunächst elektrotechnische Grundlagen, wie zum Beispiel einfache Gesetze und deren Anwendung. Dazu kommen Kenntnisse zu wichtigen Bauteilen, die auch im Praxis-Unterricht verwendet werden. Messtechnische Grundlagen runden das Spektrum ab. Als Vorübung zu der in der Qualifikationsphase zu erstellenden Projektarbeit wird in der Einführungsphase bereits das Thema Schaltungsentwicklung aufgegriffen. Im Rahmen dieser umfangreichen Lernsituation erhalten die Lernenden einen Einblick, wie man von der Idee zu einem fertigen technischen Produkt gelangt. Dabei soll das Vorgehen nachvollziehbar in einer Projektdokumentation festgehalten werden.
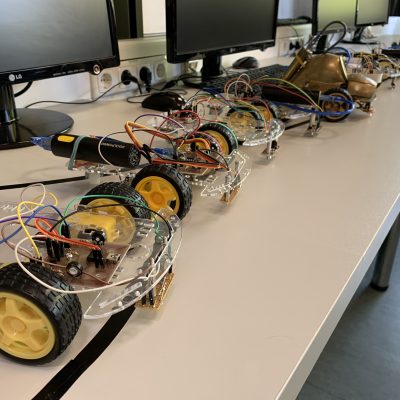
Die Lernenden des Jahrgangs 2019/20 beschlossen, einen Linienfolgeroboter zu bauen, der im Wesentlichen nur mit bereits bekannten Bauteilen realisiert werden sollte. Somit musste der Roboter ganz ohne Mikrocontroller auskommen und völlig analog funktionieren. Mit Hilfe der Erfassung von Lichtreflektion durch lichtabhängige Widerstände (LDR) kann ermittelt werden, ob sich unter dem Sensor ein heller oder dunkler Bereich, also die schwarze Linie befindet.
Die hergestellten Roboter sollen auch zukünftig weiter genutzt werden, da in den nächsten Lernsituationen die Mikrocontrollertechnik eingeführt wird und somit intelligentere Methoden der Positionserfassung, z.B. über Reflexkoppler möglich werden. Ebenso bietet das Produkt Möglichkeiten für die anstehenden Projektarbeiten, um z.B. Fernsteuerungen oder andere Automatisierungen zu entwickeln.
Projektbeschreibung des Roboterprojekts
Die Widerstandsänderungen der LDR werden über Komparatoren ausgewertet und deren Ausgänge als Steuersignale für die über Leistungstransistoren angeschlossenen Motoren verwendet. Die nötige Schaltung dazu wurde mit einer Simulationssoftware schrittweise getestet und modulweise aufgebaut. Dabei konnten die Bauteilwerte angepasst werden, so dass sie auch zukünftigen Anforderungen genügen. Nachdem die Dimensionierung und der Schaltplan funktional waren, wurde ein erster Prototyp gefertigt, dessen Schaltung auf einem Steckbrett ausprobiert wurde. Kleinere Anpassungen wurden noch identifiziert, aber die Entwicklung des Platinenlayouts konnte nun begonnen werden. Alle Lernenden entwickelten dazu nach bestimmten Vorgaben ein individuelles Layout mit professioneller Software. Dabei ist die Abstimmung mit verfügbaren Bauteilen des Lieferanten und deren Form und Größe sehr wichtig, damit später die Herstellung funktioniert. Die fertigen Layouts wurden auf Folien ausgedruckt, um damit Platinenrohlinge mit Foto Lack zu belichten und somit die Struktur in einem chemischen Ätzverfahren in Kupfer herzustellen. Die Löcher für die Bauteile wurden gebohrt und anschließend die Platine mit den Bauteilen bestückt und gelötet. Nach der Montage aller Teile auf dem Roboterchassis erfolgte ein erster Test und die Justierung der Spannungsteiler für die Erkennung der schwarzen Linie. Hier zeigten sich auch eventuelle Fehler, die dann mit der erlernten Messtechnik lokalisiert und behoben werden konnten. Als Abschluss des Projekts wurde ein Wettrennen „Der große Preis von Oldenburg“ durchgeführt, bei dem der schnellste Roboter ermittelt wurde.